A team of researchers from Zhejiang Sci-Tech University and the University of Essex has developed a submarine robot inspired by the mantis shrimp, opening new possibilities for exploring narrow and complex underwater environments.
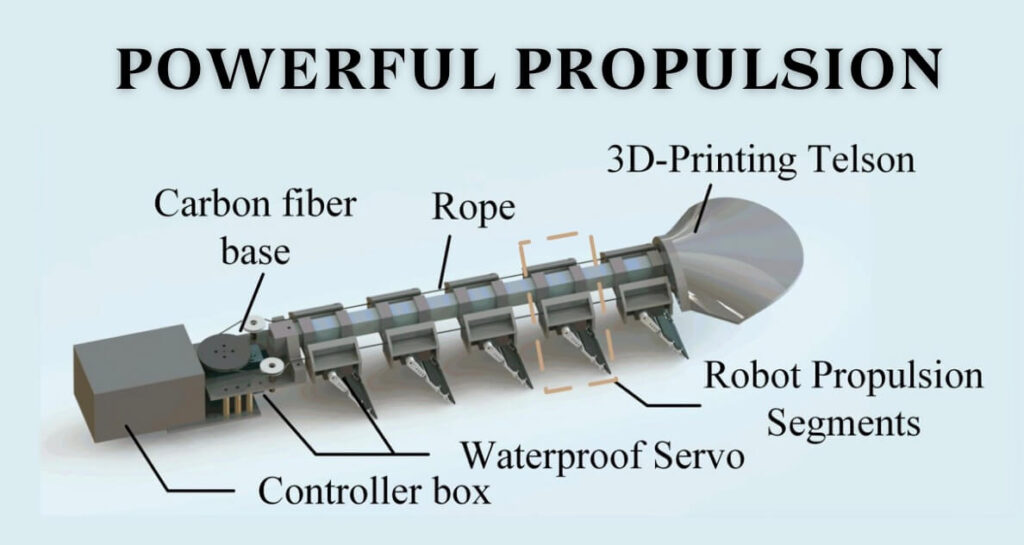
This robot, a marvel of biomimetic engineering, mimics the agility and speed of the mantis shrimp. It stands out for its design, which includes a flexible body and ten artificial pleopods, essential for maneuvering in tight underwater spaces. The structure of the pleopods, with one active joint and two passive ones, uses water resistance to facilitate movement, optimizing propulsion and control.
A novel feature of the robot is its ability to quickly and accurately adjust its direction. This is achieved through the bending of its flexible torso and the coordinated movement of its pleopods, allowing it to skillfully navigate challenging underwater environments. Additionally, the redundant design of the pleopods ensures that the robot can continue operating even if some of them fail, which is vital for extended missions in hostile environments.
In terms of hydrodynamic efficiency, the robot has been designed to effectively confront water resistance. Its combination of rigid and flexible elements, along with a streamlined tail, reduces drag and improves both stability and maneuverability.
During testing, the robot demonstrated its ability to move effectively underwater, reaching impressive speeds and tight turning radii, underscoring its potential for exploration missions in intricate underwater environments. Moreover, its capacity for precise control minimizes the risk of collisions, a crucial aspect in obstacle-filled environments.
The research team is focused on further optimizing the robot, enhancing its structure, design, and hardware systems. The incorporation of advanced sensors, such as IMUs, cameras, and depth sensors, promises more accurate and autonomous motion control, enabling the robot to perform detection and rescue tasks in narrow underwater environments.
Currently, there are plans to improve the robot’s durability and reliability, using advanced materials like carbon fiber. This will not only increase its endurance in long-duration missions but also open the door to practical applications in scientific research and marine conservation.